RC Racer
The RC Racer is a WiFi-controlled race car and handheld controller I developed for the Design of Mechatronic Systems class at Penn. The objective of this project was to get familiar with wireless communication and the design of mobile platforms. As an added goal, the car competed against 35 other teams in a race to complete a predetermined track route the fastest. Racer was among the top 4 contenders!
Mechanical Design Lead
10 23 2018 - 11 12 2018
Engineering | Industrial Design




mechanical design
With the end goal of seamless electromechanical integration, I designed the racer & controller with the following criteria:
“Massive”
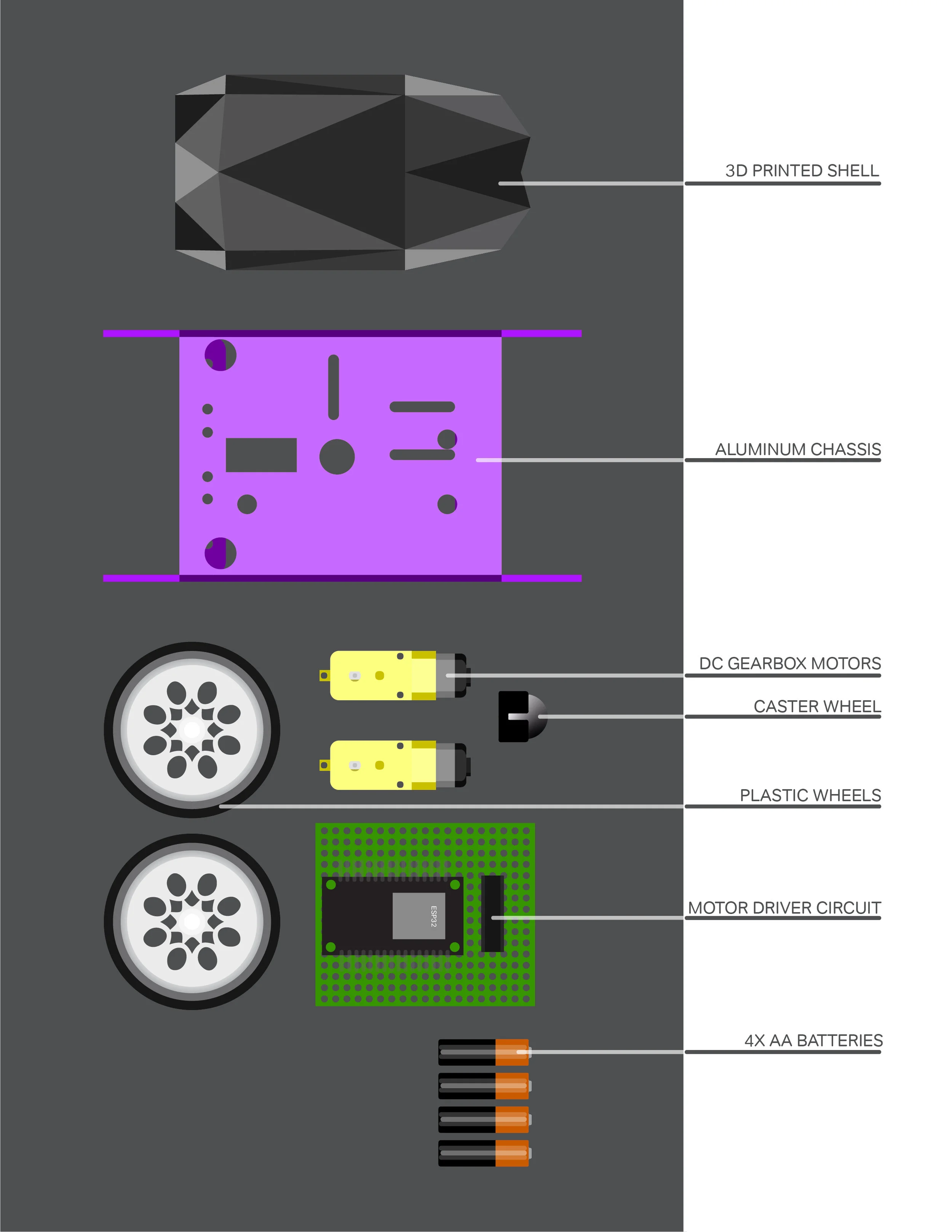
The constraints of the assignment favored heavier cars, and thus we incorporated an anodized aluminum chassis that provided structure as well as a low center of mass, housing the components low to the track. This allowed the racer to easily traverse the course and mitigate tipping up the ramp.
Agile
A challenge in the mechanical design was fitting the components into a compact, aerodynamic form while being able to drive well during the races. The minimum clearance of the track was 5” and thus the racer was dimensioned accordingly, measuring in at 5 x 7.” To achieve responsive yet simple dynamics, I incorporated a differential drive system with the addition of a low friction caster wheel for turning support and stability. Plastic gearbox motors provided enough torque to drive the wheels directly and interfaced well with existing high traction tires.
Durable
The race involved 3 cars simultaneously attempting to navigate a tight track. I designed a 3D printed shell to protect the perf boards with the additional goal of giving the vehicle a high visual status. The chassis provided additional bumper protection against other racers or the track barrier itself.
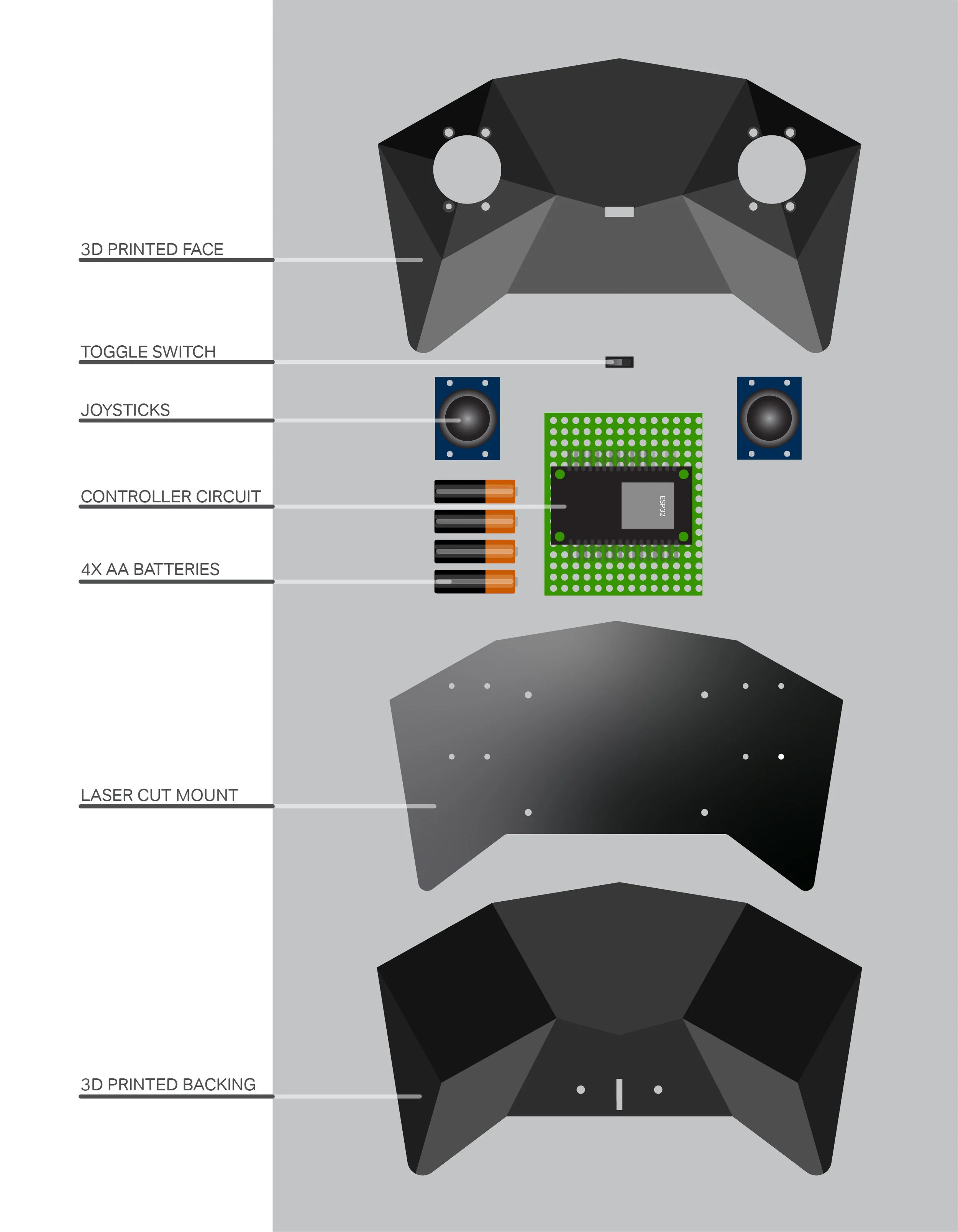
The controller was designed mainly to house the joysticks and circuitry, but in an ergonomic form that alluded to the racer’s visual language. An unobtrusive toggle switch was added to increase usability and preserve battery.
Code
The racer program (in C) can be broken down into two main modules, sending and receiving. The sending side of the code is programmed into the controller ESP32, and maps ADC inputs from each joystick to corresponding motor speeds via manipulating the duty cycle. Direction was also accounted for by having an integer variable that updates based on the ADC value of the joystick toggled. The two duty cycle values and the direction variable is sent to the racer ESP32 over WiFi via UDP packets.
Electronics
In the controller circuit, the two joysticks act essentially as potentiometer systems, each with 2 degrees of freedom along the x (L/R) and y (U/D) axes powered by an external 6V supply. The right joystick controls the turning of the car by reducing the speed of the respective wheel. The left joystick controls forward/backward movement of the racer, increasing its speed steadily.
The core of the racer circuit is activating an H-Bridge to use as a motor driver for both motors moving our car. Starting from the power source, an external 6V battery pack is directly used to power the ESP32 routed through a 5V 1A regulator, adjusting the input 6V voltage it receives to 5V, normalizing the voltage supply, to the logic pin of the H-Bridge. The ESP32 acts as the control center for the H-Bridge and motors, receiving the input wirelessly from the controller joysticks and driving the motor speed and direction accordingly.

.